
These are the models or robots we built to tell the story of the earthquake in Springfield. We have some photos of the models and we describe how they worked and some of the problems we had with them.
Conveyor Belt at Nuclear Power Station
The Bridge over the River Homer
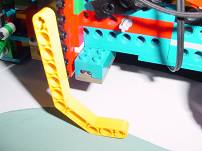
The First Truck goes from side to side and finds its way along the road. It does this by following a black line. To follow the black line we used one light sensor. The light sensor can move up and down because the truck has to go up and down a slope when it comes to the bridge.
|
This is the truck. It has two wheels at the back and runns on arms at the front. There is a light sensor at the front following the black line. |
The truck starts off with motor A running. This brings the light sensor over the black line. The light sensor is programmed to see the black line. When it sees the line it turns off motor A and turns on motor C for 0.3 seconds. It then turns off motor C and turns back on motor A. This takes the light sensor off the black line a little and then brings it back again. The truck moves zig-zag along the edge of the black line.
 |
This is the second light sensor. It is pointing to the left. It sees the lights on the Conveyor Belt and stops the truck in the right place. |
There is another light sensor on the truck. This one is pointing to the side and it will see the lights on the conveyor belt. When it sees the lights it sends a signal (the number 1) to the conveyor belt. The truck stops and the conveyor belt lets down an arm holding the conveyor belt. It turns on the belt and this drops the nuclear waste into the truck. Then it sends a signal to the truck (the number 2) and the truck is programmed to move on again when it gets this signal.
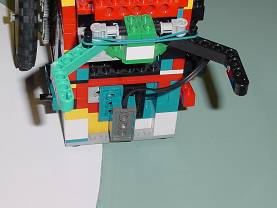
| This is the front of the truck. The arm on the left hits the touch sensor if it runs into the second truck. This stops the truck. | 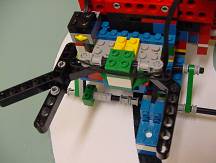 |
 |
This is the bucket on the truck. The nuclear waste dropped into the bucket. We put on a sloping piece of Lego in case it didn't drop in the exact position. Then it would roll down into the bucket. |
When it starts again the truck sends a signal to the bridge (the number 3). The bridge is waiting for this signal. When the bridge gets the signal it comes down from the upright position. It has to be lowered before the truck gets there so that it can cross.
After the bridge the truck meets the Second Truck. When it reaches the Second Truck it is stopped by a touch sensor. Then the First Truck drops the nuclear waste into the other truck. A slow motor lifts the bucket containing the waste and it rolls into the second truck.
Problems:
Group: Shane, Robert, Deirdre, Roseanne, Ciarán.
 |
The Second Truck is in two parts. The front part has the
motors, RCX, light sensor and antennae with touch sensor. The second part has the small motor to tip the nuclear waste out of the trailer. |
What the Second Truck does is the truck waits until the First Truck elivers the nuclear waste and unloads it into the back of the Second Truck. Then when that is done, the First Truck will send a signal to the Second Truck.
The program on the Second Truck is waiting for the signal. At the start of this, it sends the message 5 to the Gate of the Mine. The Truck has to go through the gate of the mine. When the gate gets the signal it is programmed to open.
The Truck then pauses for 20 seconds to give the gate time to open. Then it starts the program to follow the black line. It turns on Motor A for 0.4 seconds. This takes the light sensor away from the black line. Then Motor A is turned off and Motor C comes on. This brings the truck back to the black line. When the light sensor sees the black line Motor C goes off and Motor A comes on again for 0.4 seconds. It keeps doing that the whole time.
 |
This is the front of the truck. The antennae are attached to a touch sensor. When they hit something and bend back the sensor is released and the truck stops. The elastic band makes the antennae spring back. |
The Second Truck will go through the gate following the black line. It hits the wall behind the gate. The antennae at the front hit the wall and they spring back. This releases a touch sensor. The sensor is programmed to turn everything off. Then when everything is turned off, it sends the message 6 to the Gate.
The gate is waiting for this signal and when it gets the signal it closes. The last thing the truck does is to start Motor B which tips out the nuclear waste from the trailer.
 |
This is the gearing on the truck. An 8-tooth gear on the motor connects to a 40-tooth gear. A 24-tooth gear on the same axle connects to another 40-tooth. This is about an 8:1 reduction. |
| This is the tipper on the trailer. A small motor (bottom on right) drives an 8-tooth gear and this connects to a 24-tooth gear on another axle. This lifts the arms where the nuclear waste is carried and tips it out into the mine. |  |
Problems:
Group: Shane, Robert, Deirdre, Roseanne, Ciarán.
The Conveyor Belt at the Nuclear Power Station
The Conveyor Belt is part of the Isotope Nuclear Power Station in Springfield. All the rest of the building is made from cardboard. The Conveyor Belt was built to remove the nuclear waste from the Isotope Power Station, where an earthquake has taken place.
 |
This is the Conveyor Belt. The motor on the right raises and lowers the belt. The motor on the top drives the belt. The RCX is facing the front to get and send signals. |
When the program starts running it turns on three lights and waits for a signal from Truck 1. The truck has a light sensor which will detect the lights and then stop exactly under the Conveyor Belt. It will send the signal 1 to the conveyor belt.
| This is the gearing on the conveyor belt. The motor is sitting on the top. |  |
When the conveyor belt gets this signal it turns on motor A, which lowers the conveyor belt. When it touches touch sensor 1, it turns off motor A and turns on motor C. Motor C turns the belt and carries the nuclear waste out over the truck. The nuclear waste falls into Truck 1. The Conveyor Belt stops turning (motor C is turned off). Then the Conveyor Belt is raised again. Motor A is turned on and reversed. It goes back up until it hits touch sensor 2 and stops (turns off A and on C). Then it sends signal 2 to Truck 1. The truck is programmed to move off again when it gets this signal.
 |
The three lights on the front of the Conveyor Belt are there to stop the truck. The light sensor on the truck sees these lights and to stop the truck. |
| When the arm of the conveyor belt was raised at the end of the programme it hit a touch sensor and this stopped the programme. The next time we turned it on the touch sensor was still pressed and it turned off straight away. This note was to remind us to move the arm a little bit waway from the touch sensor before we started it again. |  |
To build the Conveyor Belt, we used two motors, 1 RCX, 3 lights, 2 touch sensors and much more.
Problems:
Group: Jane, Laura, Sinéad, Sarah.
The Bridge over the River Homer
The Bridge is built the same width as the road so that the model will fit on the bridge. On both sides of the bridge there are motors and gears. The motors are geared down so that the bridge will go down and up slower. The gearing is exactly the same on both sides so that the bridge will go up and down evenly. The gearing ratio is 25:1.
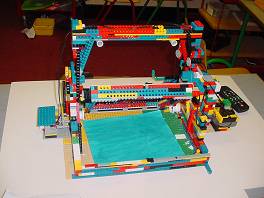 |
This is the bridge from the front. It is half way up. |
| This is the bridge from the side. The bridge is lifted with pulleys and fishing line. When the bridge is being raised all the weight is on the top. We had to build it very strong. In the beginning the top kept breaking with the weight. | 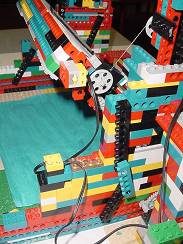 |
We programmed the bridge so that when it gets the signal 3 from Truck 1, the bridge turns on motors A and C. This lowers the bridge. Then when it goes down as far as it can, it touches a touch sensor. The touch sensor is programmed to stop the motors and wait for about 70 seconds. This is to give the truck time to cross the bridge. Then it goes back up to where it was at the beginning and touches the touch sensor at the top. This touch sensor is programmed to turn off motors A and C.
Problems:
Bridge Group: Sharon, Andrew, Ciarán and Ethan.
The gate is opened by raising it up. The gate is supported by two piers and it slides between braces to keep it from swinging back and forth. There are two motors at the top, one at each side. Each motor is programmed the same to keep the bridge moving evenly on both sides.
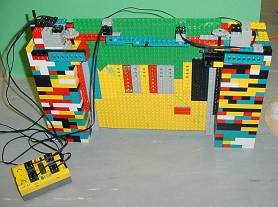 |
This is the Mine Gate. There are motors at the top on each side and a touch sensor on each side. |
The motors are attached to crown gears to change the direction of the drive. They lower and raise the gate with rack gears. There is a line of rack gears up each side of the gate. When the gate is raised high enough it hits a touch sensor which is programmed to stop it. When the gate is lowered almost to the ground it touches another touch sensor which is programmed to stop it.
| This is the rack gear up the side of the gate. |  |
 |
This is the motor attached to the crown gear at the top of the gate. You can also see the touch sensor to stop the gate when it is raised. |
Our gate is waiting for a signal form the Second Truck. We have two motors. Wen the signal is sent they will open until the touch sensor is pressed, then the gate stops. Then the truck follows the black line though the gate. When it gets to the back, the touch sensor is pressed. Then it sends another signal to our RCX to close the gate again until the second touch sensor is pressed.
Then the trailer, which is connected to the truck, lifts a scoop and drops the nuclear waste and Springfield is saved.
Problems:
Group: Adam Randall, Paul Kelly, Owen Warren, Jamie Bergin, Zephlin Fogarty.